Project: Autonomous Line-Following Rover
Event: 2023 Robotics Space Exploration (RSX) Space Exploration Engineering Kompetition (SEEK)
Result: 1st Place Finish
Objective: The competition challenged teams to rapidly prototype, build, and program an autonomous line-following robot using a restricted bill of materials, with the primary metric for success being course completion speed.
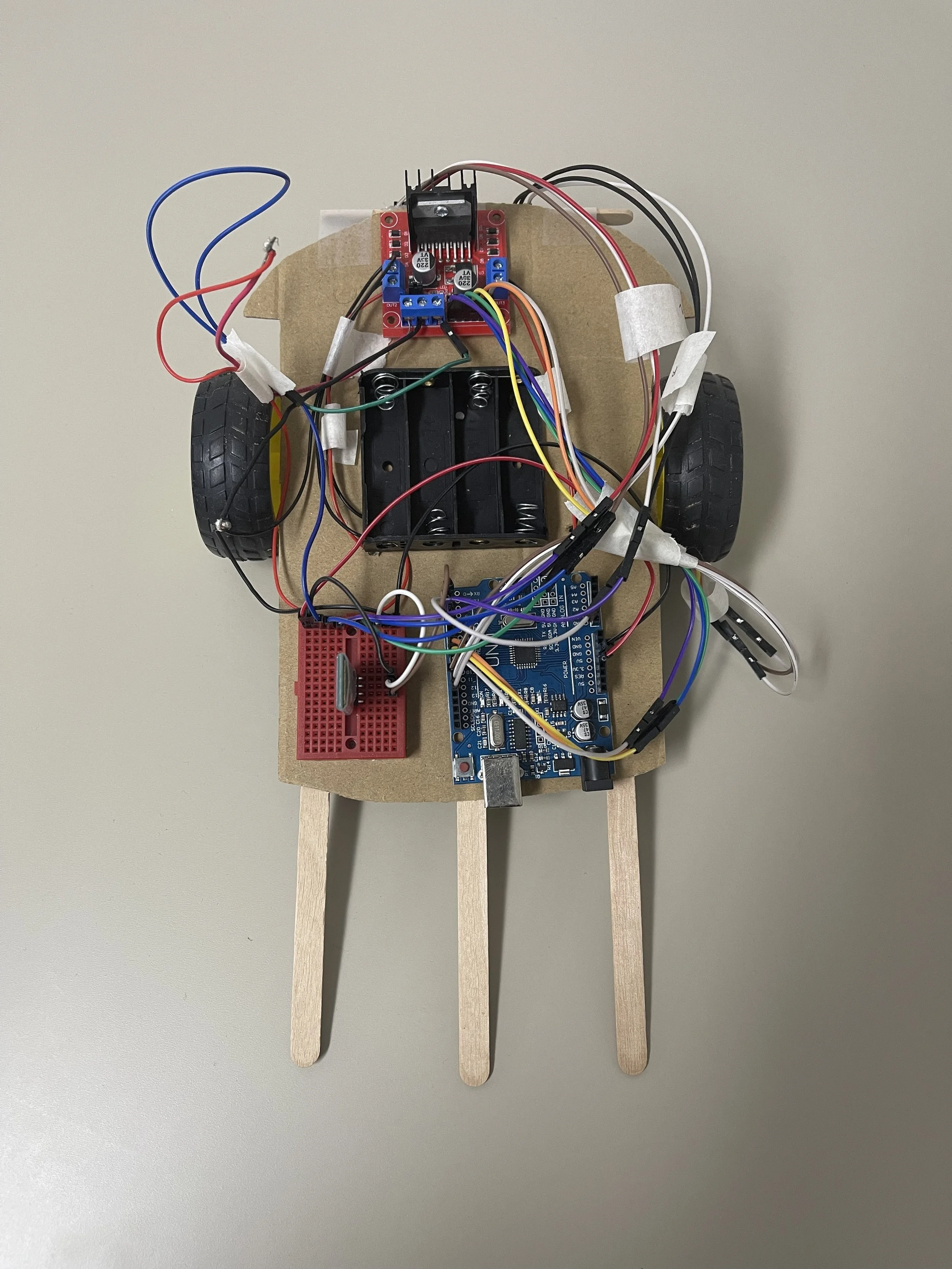
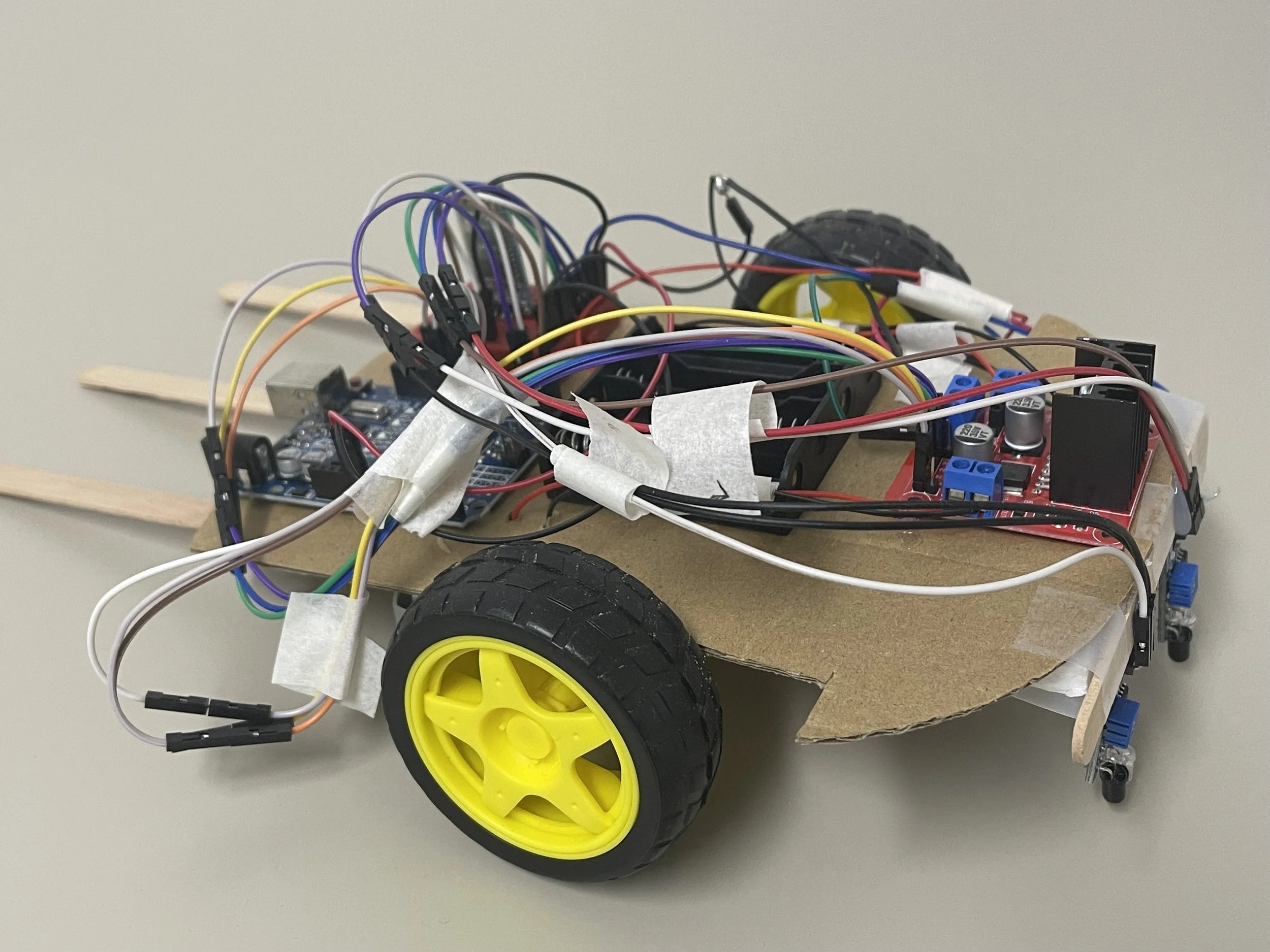
Project Description: We developed a lightweight, differential-drive rover utilizing an Arduino Uno, a dual H-bridge motor driver, and two infrared (IR) sensors. The physical chassis was constructed from cardboard to minimize weight and maximize acceleration.
Control Architecture: To maintain a high yet controlled pace, we implemented a bang-bang control algorithm on the microcontroller. The system processed real-time feedback from the dual IR sensors to instantaneously toggle motor states and RPM for rapid path correction.
Hardware Calibration and Kinematics: Maximizing track speed without derailing required extensive physical tuning. We iteratively adjusted the attack angle of the IR sensors relative to the ground to optimize the line-detection threshold. Furthermore, we manipulated the placement of the breadboard and heavy components across the chassis to optimize the center of gravity, ensuring stability during high-speed cornering.
Outcome: The rover secured 1st place, consistently navigating and completing the complex racecourse significantly faster than competitors. A video demonstration of the robot successfully traversing the track is included below.
RSX SEEK Hackathon 2023: Line Follower Robot